Applications to Physics
#Math241
Coordinate Systems
Setup
通过 Linear Mapping 换系:一个正交矩阵用来替换正交基,一个平移向量确定原点
正交矩阵的基本性质
- 模长不变
$$ |Ux| = |x| $$
意味该变换能够保持距离不变
$$ d(x,y) = |x-y| = |Ux’-Uy’|= |x’-y’| $$
- $U、U^{T}$
$$ UU^{T} = I_{n} $$
- $\det(U)=\pm1$
Motion in Space: Velocity and Acceleration
Velocity, Speed and Acceleration
注意速度、速率与加速度取决于对曲线参数的选取,而曲率、曲线长度、转矩则独立于曲线参数的选取
- Velocity: 直接考虑对点的运动轨迹求导,即可得出运动的顺势速度(包括方向与大小)

- Speed: 即为速度向量的模长
$$ |v(t)|=|r’(t)|=\frac{ds}{dt} $$
- Acceleration
$$ a(t)=v’(t)=r’‘(t) $$
- 联系:牛顿运动定律: $F(t)=ma(t)$

- Projectile Motion 抛体运动 (考虑物理方法即可)
Tangential and Normal Components of Acceleration
$$
\begin{align}
& T(t) = \frac{r’(t)}{|r(t)|} = \frac{\mathrm{v}}{v}
& a = \mathrm{v}’ = (vT)’ = v’T + vT’
& \kappa = \frac{|T’|}{|r’|} = \frac{|T’|}{v}, T’=|T’|N=\kappa vN
& a = v’T + \kappa v^{2}N
& a = a_{T}T+ a_{N}N, a_{T}=v’, a_{N}=\kappa v^{2}
\end{align}
$$
其中: 可以分别利用点乘计算相应的系数(对于 T,N 的便捷计算则可以参考先后求一二阶导后考虑正交化)
$$
\begin{align}
& a_{T}=v’=\frac{\mathrm{v}\cdot a}{v}= \frac{r’(t)\cdot r’’(t)}{|r’(t)|}
& a_{N} = \kappa v^{2}= \frac{|r’(t)\times r’’(t)|}{|r’(t)|}
\end{align}
$$
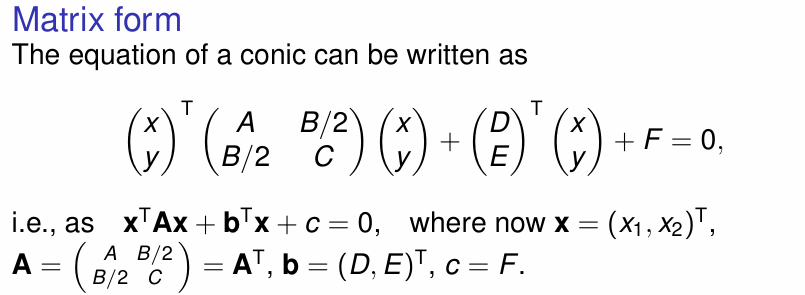
Polar form of Conics(圆锥曲线的极坐标形式)
二次型
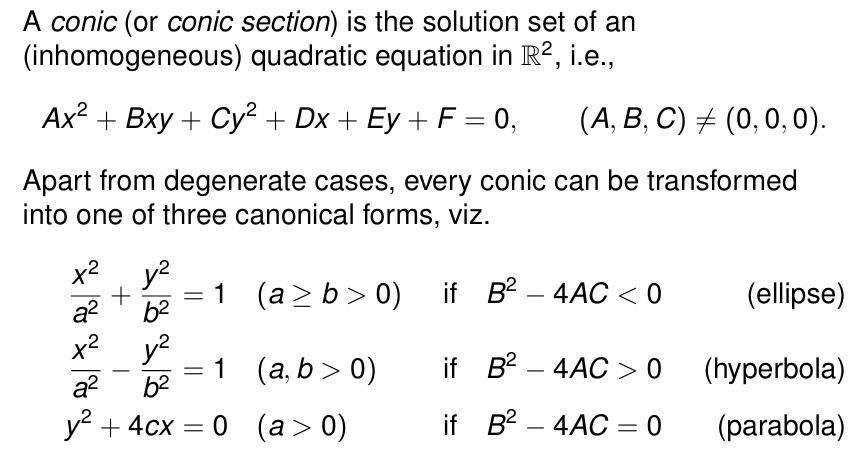
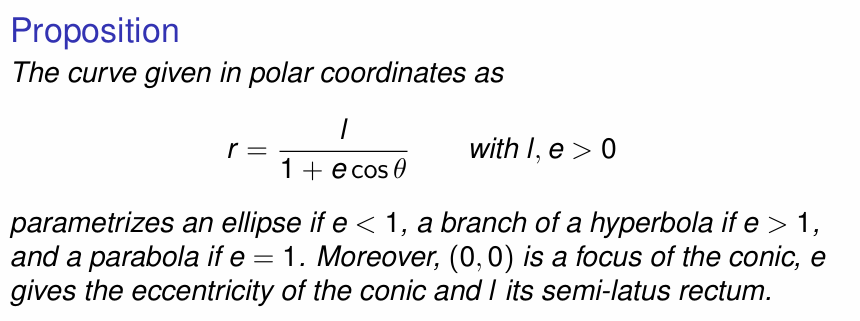
极坐标形式:非退化的二次曲线到焦点与到准线的距离之比为定值
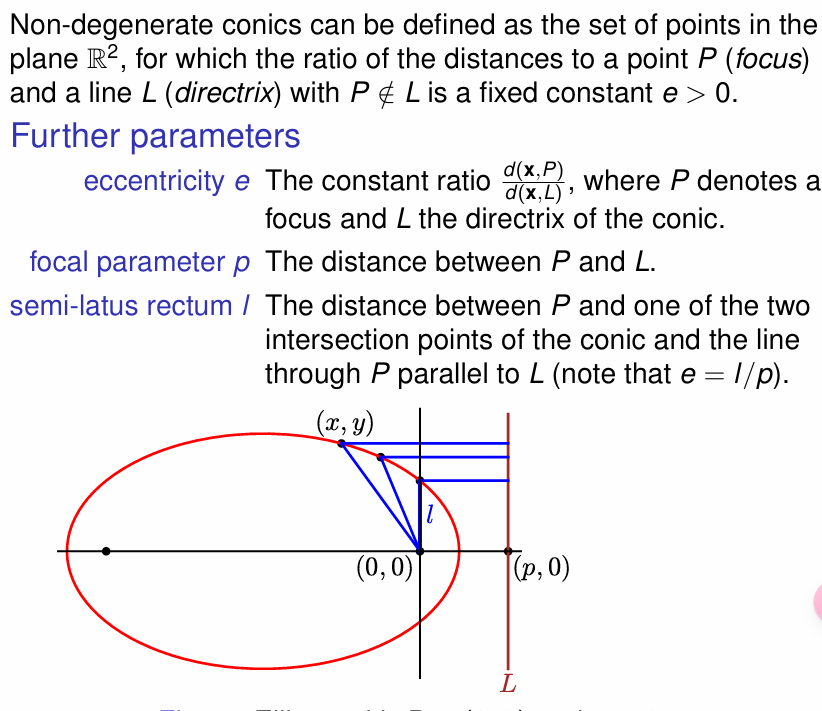
- 离心率 $e =\frac{\sqrt{ a^{2}\mp b^{2} }}{a}$
- 焦准距
- 半通径 $e=\frac{l}{p}$
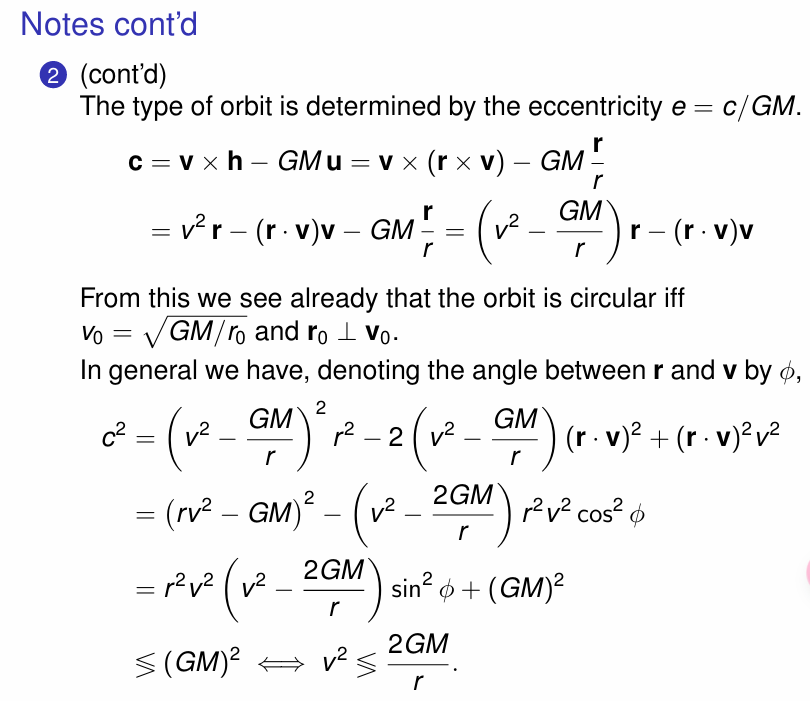
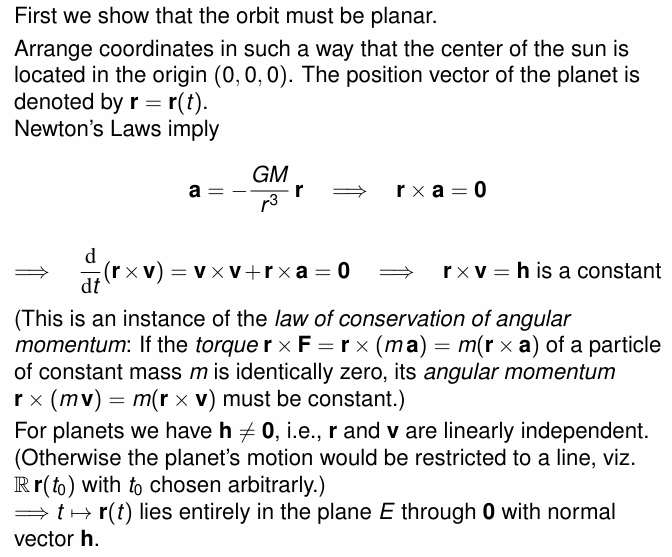
Kepler’s Laws of Planetary Motion 开普勒行星运动定律
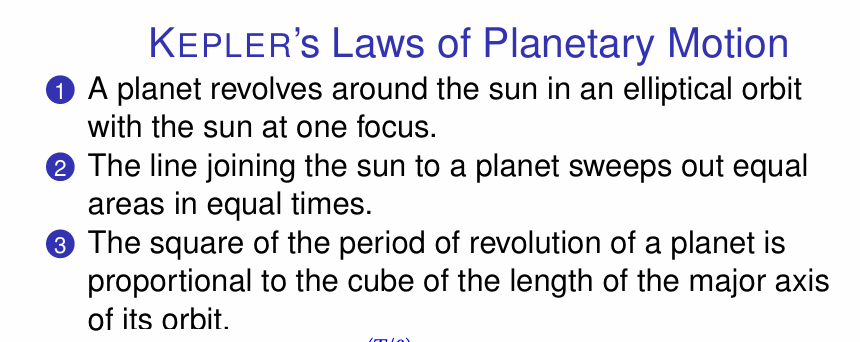
证明
- 首先证明行星的运动轨迹为平面
r 与 a 的叉乘为 0 -> 角加速度为 0 ->角动量为定值
这样我们即可得到该运动轨迹所对应确定平面的角动量
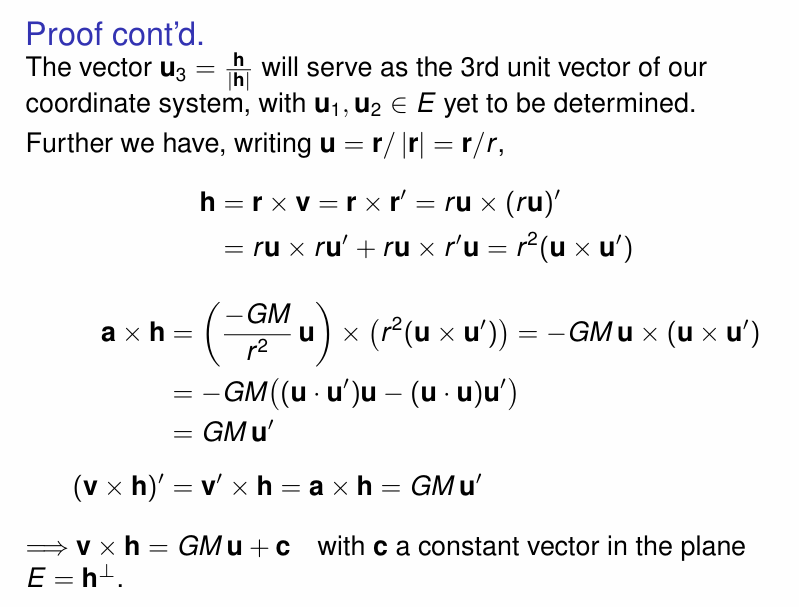
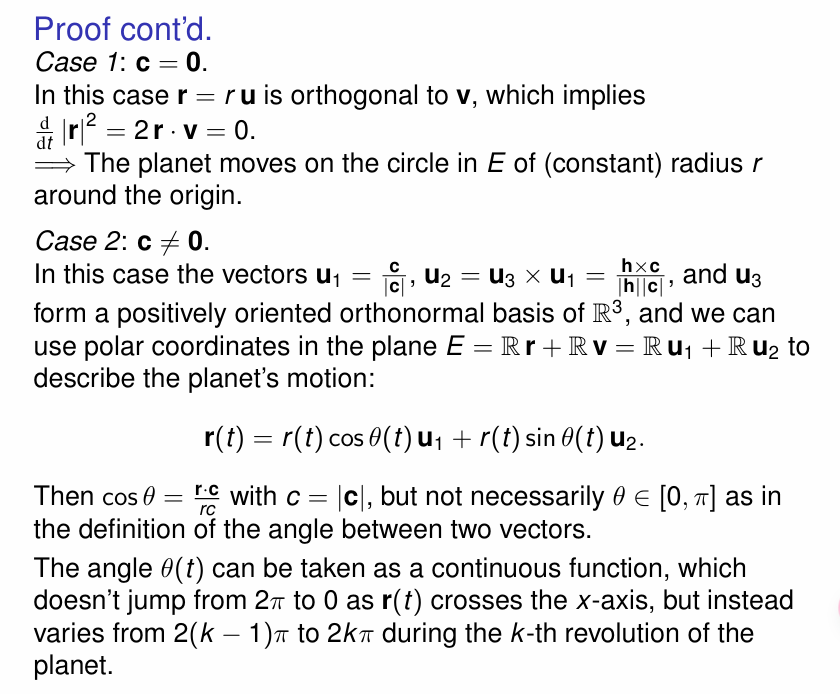
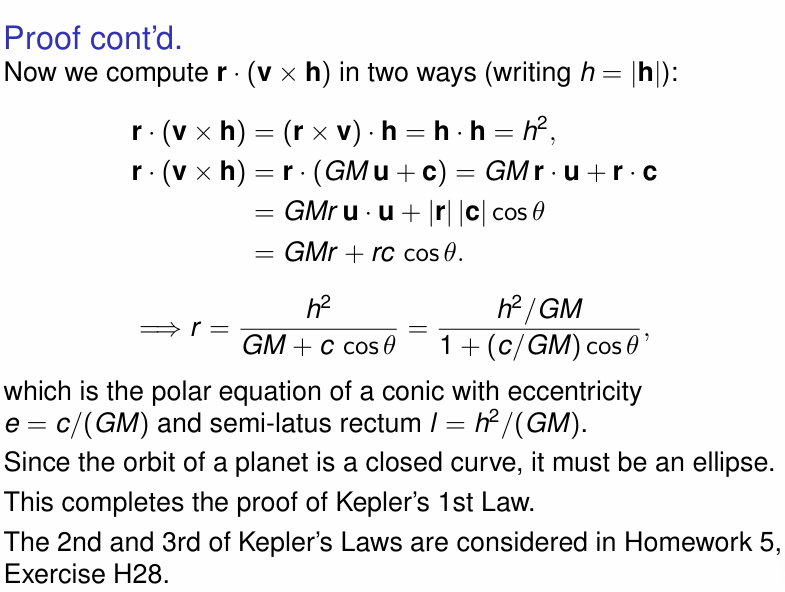
注意 e 与 l 的取值
$$ e = \frac{c}{GM} , l = \frac{h^{2}}{GM} $$