Coordinate System
#Math241
建立平面坐标系
- 固定的参考点(原点)
- 坐标轴的方向向量
- 单位长度
直线
- 确定直线的方向
- 直线上一点 + 方向向量
- 直线上两点
不同的表示形式:
$$
\begin{align}
& l = p + \mathbb{R}q
& l = (1- \lambda)p + \lambda q
\end{align}
$$
- 基本相关
- 确定直线的交角 ->考虑点乘
对于任意两直线的方向向量:$p, q$,我们有:
- 确定直线的交角 ->考虑点乘
$$
\begin{align}
& \cos(\phi) = \frac{p \cdot q}{|p||q|}
& p \cdot q > 0 \ \text{两直线夹角为锐角}
& p \cdot q = 0 \ \text{两直线夹角为直角}
& p \cdot q < 0 \ \text{两直线夹角为钝角}
\end{align}
$$
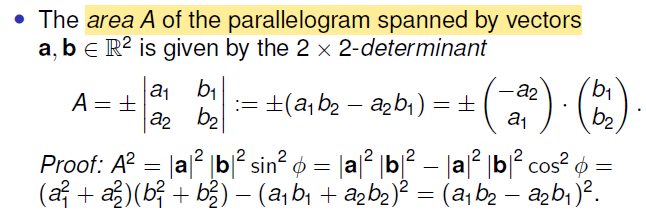
- 确定两向量确定平行四边形的面积
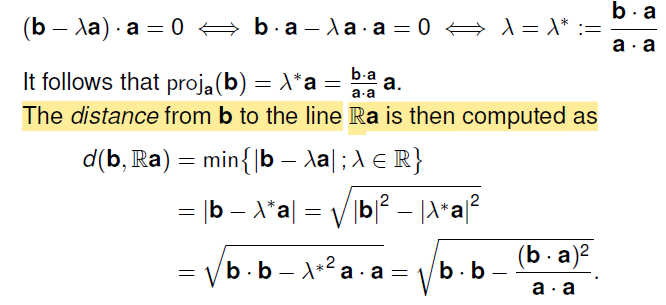
- 确定两向量之间的投影
$(b-\lambda a)\cdot a=0$
- 换系:
将新的坐标轴方向向量用原轴方向向量表示(Linear combination)
同时注意如果有平移再加上一个向量确定移动后的原点

三维坐标系
距离计算
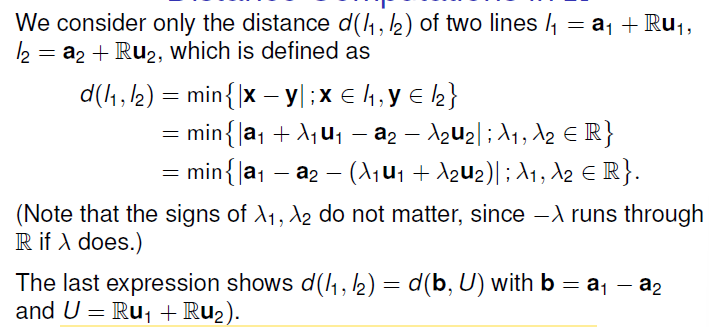
- 两直线之间的距离 ->本质上即为一点到一平面的距离(直接利用线代计算投影)
或者理解为寻找两直线公共的法向量
或者考虑向平面的法向量做投影
Link with Geometry
从不同的视角理解向量
- 考虑向量作为笛卡尔积中的点
- 将向量视作一个方向与模长都确定 arrow,可以进行向量的加法
$$
T: \mathbb{R}^{2}\to \mathbb{R}^{2}, x = \begin{bmatrix}
x_{1}
x_{2}
\end{bmatrix}
\to x+v = \begin{bmatrix}
x_{1}+v_{1}
x_{2} + v_{2}
\end{bmatrix}
$$
Combination
Linear Combination
对向量集做任意的线性组合(Scalar+Addition)
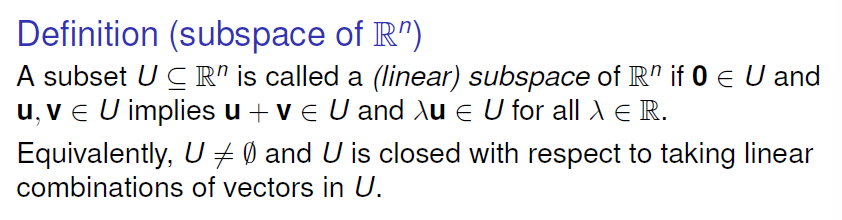
线性子空间需要满足的条件 (也是验证一个线性空间的基本方式):
- 包含元素 0
- 取集合中的任意两个元素
- 对任意向量倍乘仍在该集合内

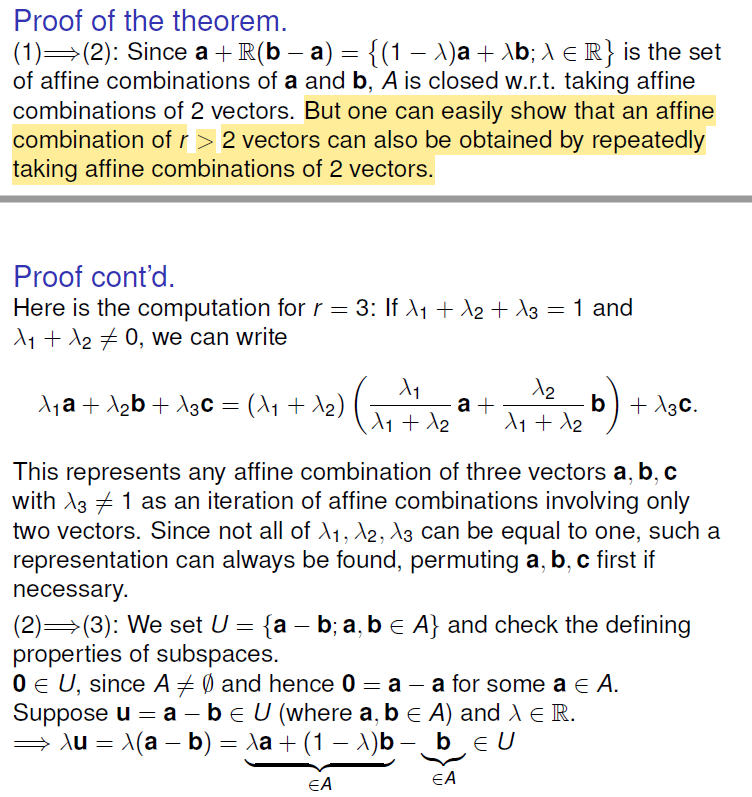
Affine Combination
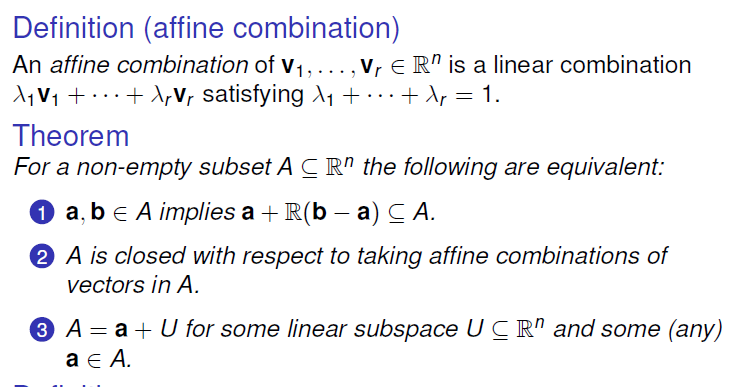
上述性质等价的证明:


- 与线段定比分点的联系

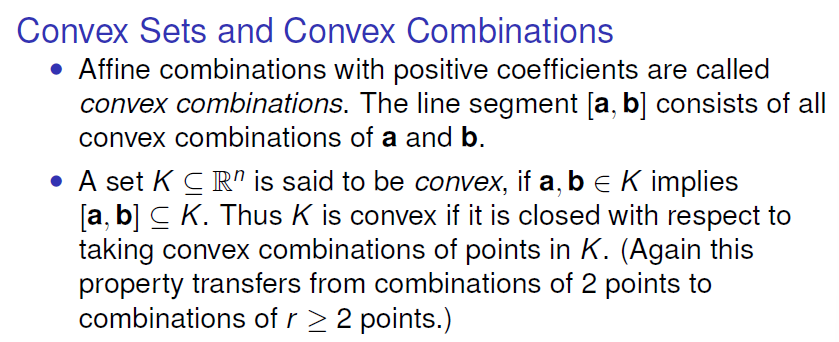
凸组合与凸集
当仿射组合的系数均为正时我们组成了一个凸组合
Equational and Parametric Representation
Equational Representation
将线性空间表现为线性方程组解的集合
在 $\mathbb{R}^{3}$ 中,直线、平面以及点的表示形式分别为:
$$
\begin{align}
& a_{1}x_{1}+a_{2}x_{2}+a_{3}x_{3}=b \ ((a_{1},a_{2},a_{3})\in \mathbb{R}^{3} \setminus {0})
& a_{1}(x_{1}-p_{1})+a_{2}(x_{2}-p_{2})+a_{3}(x_{3}-p_{3})=0 \ \text{空间中确定的点+法向量}
& \text{Line: The Intersection of two planes.}
& \text{Point: The Intersection of three planes.}
\end{align}
$$
方程表示与参数表示的转换:
- 参数表示 ->方程表示
- 将参数表示代入方程考虑恒成立
- 直接代入特殊点以及利用自由度赋值求解
- 将平面分为点 + 法向量(利用垂直求解法向量)
- 方程表示 ->参数表示
直接考虑线性方程组的求解即可
Parametric Equation
- Line
$$ r = r_{0} + \mathbb{R}v $$

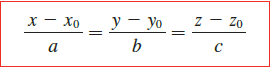
Another Form of Representation: Symmetric Representation

- Plane
Vector Equation
$$
n \cdot (r-r_{0}) = 0 \text{ or } n \cdot r = n \cdot r_{0}
$$
Scalar Equation

Linear Equation
$$ ax+by+cz+d = 0 $$
-
Distance
点到平面的距离
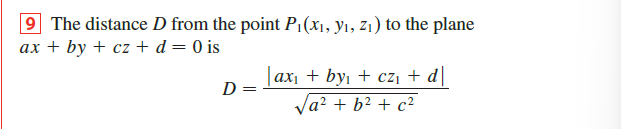
-
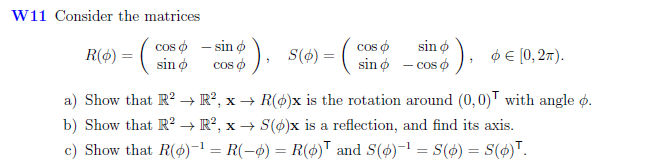
旋转与对称矩阵
Cylinders and Quadratic Surfaces
Cylinders
Definition:
A cylinder is a surface that consists of all lines (called rulings) that are parallel to a
given line and pass through a given plane curve.
Quadric Surfaces(二次曲面)
Definition:
A quadric surface is the graph of a second-degree equation in three variables x, y, and
z. The most general such equation is
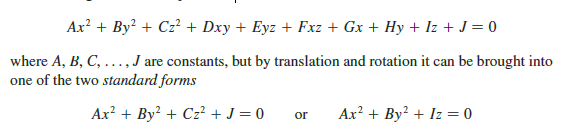
二次型相关汇总:(Homework4)
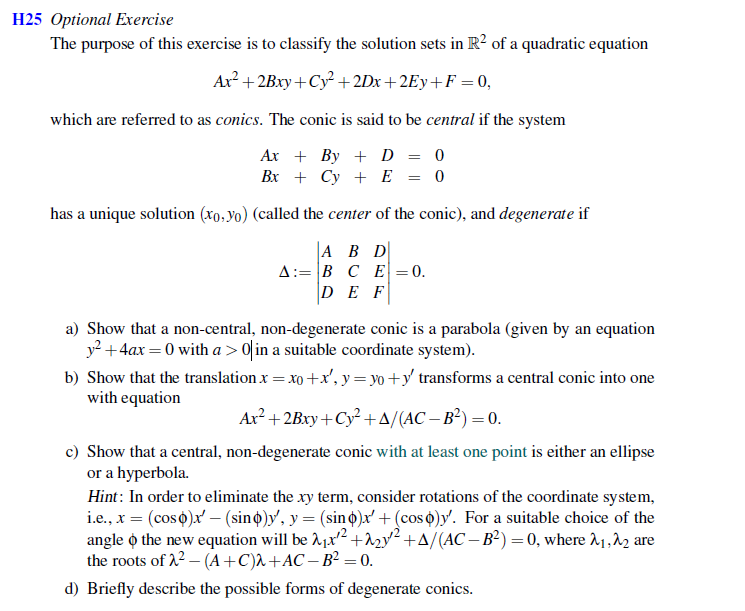
- 第一步利用
$$
\begin{bmatrix}
A, B
B, C
\end{bmatrix}\begin{bmatrix}
x
y
\end{bmatrix} = \begin{bmatrix}
-D
-E
\end{bmatrix}
$$
判断该二次型是否中心对称,如果为中心对称,则可利用上述方程解出的唯一解将该二次曲线移回原点(非中心对称有多解)
- 第二步考虑对一个非退化的二次曲线,利用一个旋转矩阵将交叉项消去,旋转矩阵系数由如下得到(具体的话考虑如何选取合适的参数使得交叉项系数为 0)
$$
\begin{bmatrix}
x
y
\end{bmatrix} = \begin{bmatrix}
\cos\phi, -\sin \phi
\sin \phi, \cos \phi
\end{bmatrix} \begin{bmatrix}
x’
y’
\end{bmatrix}
$$
最终化简为:
$$
\begin{align}
& \lambda_{1}x’^{2} + \lambda_{2}y’^{2} + \frac{\Delta}{AC-B^{2}} = 0
& \lambda ^{2} -(A+C)\lambda +AC-B^{2}=0
\end{align}
$$