Data Structure-2
#CS225
Tree
Concept & Teminology
-
定义: 树是一种 非线性 (non-linear) 数据结构,由 节点 (node) 和 边 (edge) 组成。
-
关键特性:
- Acyclic Graph (无环图): 树中不存在环路。
- Connected Graph (连通图): 任意两个节点之间都存在路径。
-
术语:
- 节点 (Node/Vertex): 树中的每个元素。
- 边 (Edge): 连接两个节点的线。
- 根节点 (Root): 树的顶端节点,没有父节点。
- 父节点 (Parent): 有子节点的节点。
- 子节点 (Child): 被父节点指向的节点。
- 兄弟节点 (Sibling): 拥有相同父节点的节点。
- 路径 (Path): 从一个节点到另一个节点经过的边的序列。
- 叶子节点 (Leaf): 没有子节点的节点。
- 子树 (Subtree): 树中的任意节点及其所有后代。
- 祖先 (Ancestor): 从根节点到某个节点路径上的所有节点。
- 后代 (Descendant): 某个节点子树中的所有节点。
- 高度 (Height): 从根节点到最远叶子节点的 最长路径 (longest path) 上的 边的数量 (Count Edges)。
二叉树及基本性质
-
定义: 二叉树 (Binary Tree) 是一种特殊的树,其中每个节点最多有两个子节点,分别称为 左子节点 (left child) 和 右子节点 (right child)。
-
性质:
- 满二叉树 (Full Binary Tree): 每个节点要么没有子节点,要么有两个子节点。
- 完美二叉树 (Perfect Binary Tree): 所有内部节点都有两个子节点,并且所有叶子节点都在同一层。 高度为 h 的完美二叉树的节点数量: $2^{h+1}-1$
- 完全二叉树 (Complete Binary Tree): 除了最后一层,其他每一层都是满的,并且最后一层的节点都尽可能地靠左排列。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
template <class T>
class BinaryTree {
private:
struct TreeNode {
T data;
TreeNode *left;
TreeNode *right;
};
TreeNode *root;
public:
BinaryTree() : root(nullptr) {} // 构造函数
~BinaryTree() { clear(); } // 析构函数,释放内存
// ... (其他方法,例如 insert, remove, traverse 等) ...
};
1. Height
定义:
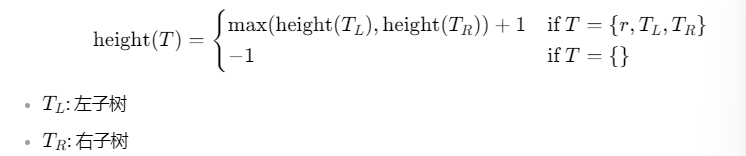
- 从根节点到最远叶子节点的最长路径 (longest path) 上的 边的数量 (Count Edges)。
- 空树的高度是 -1。
- 只有一个节点的树的高度是 0。
递归定义:
2. Full Tree
每个节点要么没有子节点,要么有两个子节点
- $F={}$ 空树为满二叉树
- $F={r,T_{L},T_{R}}$ 其中 $T_{L},T_{R}$ 要么都为空,要么都不为空
3. Perfect Tree
所有内部节点都有两个子节点,并且所有叶子节点都在同一层
高度为 h 的完美二叉树的节点数量: $P_{h} = 2^{h+1}-1$
递归定义:
- $P={}$
- $P={r,T_{L},T_{R}}$ 其中 $T_{L},T_{R}$ 高度均为 $h-1$
4. Complete Tree
除了最后一层,其他每一层都是满的,并且最后一层的节点都尽可能地靠左排列。
- 递归定义:对于高度为 h 的完全二叉树 $C_h$:
- $C_{-1}= {}$ (空树是高度为 -1 的完全二叉树)
- $C_{h} = {r,T_{L},T_{R}}$, 并且满足以下条件之一:
- $T_{L}是C_{h-1}$, $T_{R}是P_{h-2}$
- $T_{L}是P_{h-1}$ , $T_{R}是C_{h-1}$
- P: 完美二叉树 (perfect binary tree)
- C: 完全二叉树 (complete binary tree)
- 下标表示树的高度
[!warning] 注意
- 满二叉树不一定是完全二叉树
- 完全二叉树不一定是满二叉树
5. NULL 的数量
NULL 的数量为当前节点数量 +1(可以利用数学归纳法证明)
Abstract Data Type(ABT)
Insert
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
template <class T>
void BinaryTree<T>::insert(T value) {
TreeNode *newNode = new TreeNode{value, nullptr, nullptr};
if (!root) {
root = newNode;
return;
}
TreeNode *current = root;
while (current) {
if (value < current->data) {
if (!current->left) {
current->left = newNode;
return;
}
current = current->left;
} else {
if (!current->right) {
current->right = newNode;
return;
}
current = current->right;
}
}
}
Remove
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
template <typename T>
void Tree<T>::remove(TreeNode<T>* node) {
if (node == nullptr) return;
// 获取父节点引用
TreeNode<T>* parent = node->parent;
// 处理节点是根节点的情况
if (parent == nullptr) {
// 根节点删除操作
delete_subtree(root);
root = nullptr;
return;
}
// 处理一般情况
// 1. 更新父节点的子节点链表
if (parent->firstChild == node) {
// 如果是第一个子节点
parent->firstChild = node->nextSibling;
} else {
// 如果不是第一个子节点,需要遍历找到前一个兄弟节点
TreeNode<T>* sibling = parent->firstChild;
while (sibling != nullptr && sibling->nextSibling != node) {
sibling = sibling->nextSibling;
}
if (sibling != nullptr) {
sibling->nextSibling = node->nextSibling;
}
}
// 2. 递归删除子树
delete_subtree(node);
}
// 删除子树的辅助函数
template <typename T>
void Tree<T>::delete_subtree(TreeNode<T>* node) {
if (node == nullptr) return;
// 递归删除所有子节点
TreeNode<T>* child = node->firstChild;
while (child != nullptr) {
TreeNode<T>* next = child->nextSibling;
delete_subtree(child);
child = next;
}
// 删除当前节点
delete node;
}
Copy
1
2
3
4
5
6
7
8
9
template<class T>
TreeNode * BinaryTree<T>::copy_(TreeNode* root){
if (root != nullptr){
TreeNode* t = new TreeNode(root->data);
t->left = copy_(root->left);
t->right = copy_(root->right);
}
return t;
}
Clear
1
2
3
4
5
6
7
8
template<class T>
void BinaryTree<T>::clear_(TreeNode* root){
if(root != nullptr){
clear_(root->left);
clear_(root->right);
delete root;
}
}
Traversal
Depth-First 深度优先遍历
1. 前序遍历(Pre-order Traversal)
先访问根节点,然后递归地前序遍历左子树,最后递归地前序遍历右子树。
2. 中序遍历(In-order Traversal)
先递归地中序遍历左子树,然后访问根节点,最后递归地中序遍历右子树。
3. 后续遍历(Post-order Traversal)
先递归地后序遍历左子树,然后递归地后序遍历右子树,最后访问根节点。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
template <class T>
void BinaryTree<T>::preOrder(TreeNode *root) {
if (root != NULL) {
std::cout << root->data << " "; // 访问根节点
preOrder(root->left); // 递归遍历左子树
preOrder(root->right); // 递归遍历右子树
}
}
template <class T>
void BinaryTree<T>::inOrder(TreeNode *root) {
if (root != NULL) {
inOrder(root->left); // 递归遍历左子树
std::cout << root->data << " "; // 访问根节点
inOrder(root->right); // 递归遍历右子树
}
}
template <class T>
void BinaryTree<T>::postOrder(TreeNode *root) {
if (root != NULL) {
postOrder(root->left); // 递归遍历左子树
postOrder(root->right); // 递归遍历右子树
std::cout << root->data << " "; // 访问根节点
}
}
Level-order Traversal 层序遍历
-
按照树的层次,从上到下,从左到右逐层访问节点。
-
实现方法:通常使用队列(Queue)来实现。
-
算法步骤:
- 将根节点放入队列。
- 当队列不为空时,执行以下操作: a. 取出队列的头节点并访问。 b. 如果该节点有左子节点,将左子节点放入队列。 c. 如果该节点有右子节点,将右子节点放入队列。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
template <class T>
void BinaryTree<T>::levelOrder(TreeNode *root) {
std::queue<TreeNode *> q;
q.enqueue(root);
while (!q.isEmpty()) {
TreeNode *node = q.dequeue();
if (node != NULL) {
std::cout << node->data << " ";
if (node->left)
q.enqueue(node->left);
if (node->right)
q.enqueue(node->right);
}
}
}
Breadth First V.S. Depth First
[!tip] Traversal 与 Search
Traversal: 遍历每一个节点一次
Search: 访问每个节点直到我们找到一个或多个满足要求的节点
| 特性 | BFS | DFS |
|---|---|---|
| 数据结构 | 队列 (Queue) | 栈 (Stack) |
| 访问顺序 | 按层级 | 按深度 |
| 空间复杂度 | 可能更高 (需存储整层顶点) | 通常较低 |
| 适用场景 | 寻找最短路径、关系网络分析 | 拓扑排序、连通性检测 |
| 实现难度 | 稍微复杂 | 相对简单 |
Binary Search Tree
Definition
-
基本定义: BST 是一种特殊的二叉树 (Binary Tree),它或者为空,或者满足以下递归属性:
- 每个节点包含一个键 (Key) 和关联的值 (Value)。
- 对于树中的任意节点
r:- 其左子树 (Left Subtree)
TL中所有节点的键都 小于 节点r的键。 - 其右子树 (Right Subtree)
TR中所有节点的键都 大于 节点r的键。 - 其左子树
TL和右子树TR本身也必须是二叉搜索树。
- 其左子树 (Left Subtree)
- 核心目的: 利用这种有序属性,实现高效的查找、插入和删除操作。
性能分析
-
最佳情况 (Best Case):
- 当树是平衡 (Balanced) 的时候 (例如,形状接近完美二叉树 Perfect Binary Tree 或完全二叉树 Complete Binary Tree),树的高度
h大约是 $h \approx O(\log n)$,其中 $n$ 是节点数。 - 查找、插入、删除操作的时间复杂度为 $O(\log n)$。
- 当树是平衡 (Balanced) 的时候 (例如,形状接近完美二叉树 Perfect Binary Tree 或完全二叉树 Complete Binary Tree),树的高度
-
最坏情况 (Worst Case):
- 当插入的元素是有序的 (或接近有序) 时,BST 会退化成一个链表 (Linked List) 结构。
- 树的高度
h变为 $O(n)$。 - 查找、插入、删除操作的时间复杂度变为 $O(n)$。
- 结论: BST 的效率高度依赖于其结构是否平衡,即依赖于元素的插入顺序。这也引出了后续更高级的自平衡 BST (如 AVL 树, Red-Black Tree) 的需求。
具体实现
-
节点结构 (TreeNode): 通常使用一个结构体或类来表示节点。
1 2 3 4 5 6 7 8 9 10 11
template <class K, class V> struct TreeNode { K key; V value; TreeNode* left; TreeNode* right; // Constructor with initializer list TreeNode(const K& newKey, const V& newValue) : key(newKey), value(newValue), left(nullptr), right(nullptr) {} };
-
key,value: 存储键和值。 -
left,right: 指向左右子节点的指针 (Pointer)。使用nullptr表示没有子节点。 -
模板 (Template) (
template <class K, class V>): 使 BST 可以存储任意类型的键和值。
-
-
BST 类骨架:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
template <class K, class V> class BST { public: // Constructor, Destructor, etc. BST(); ~BST(); // Important for memory management! // Public interface functions void insert(const K& key, const V& value); V find(const K& key) const; void remove(const K& key); // ... other functions like traverse ... private: TreeNode<K, V>* root; // Pointer to the root node // Private recursive helper functions // Note the use of TreeNode*& for modification TreeNode<K, V>*& find(TreeNode<K, V>*& subroot, const K& key); // Non-const version for internal use const TreeNode<K, V>* find(const TreeNode<K, V>* subroot, const K& key) const; // Const version for public find void insert(TreeNode<K, V>*& subroot, const K& key, const V& value); void remove(TreeNode<K, V>*& subroot, const K& key); // ... other helpers like finding successor/predecessor, clear/destroy ... // Helper for finding inorder successor (example for remove) TreeNode<K, V>*& inorderSuccessor(TreeNode<K, V>*& node); };
-
root: 指向树根节点的私有成员指针。 -
公共接口 (Public Interface): 提供给用户的简洁函数 (如
insert(key, value))。 -
私有辅助函数 (Private Helpers): 通常是递归函数,处理实际的树操作。它们经常使用
TreeNode*&参数来实现对树结构的修改。
-
BST 操作与 C++ 实现思路
-
查找 (Find):
-
逻辑: 从根节点开始,比较目标键
key与当前节点subroot->key:- 相等: 找到。
-
key < subroot->key: 递归在左子树subroot->left中查找。 -
key > subroot->key: 递归在右子树subroot->right中查找。 -
subroot == nullptr: 未找到。
-
C++ (Const Helper):
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
template <class K, class V> const TreeNode<K, V>* BST<K, V>::find(const TreeNode<K, V>* subroot, const K& key) const { if (subroot == nullptr) { return nullptr; // Base case: Not found } if (key == subroot->key) { return subroot; // Base case: Found } else if (key < subroot->key) { return find(subroot->left, key); // Recurse left } else { return find(subroot->right, key); // Recurse right } } // Public interface would call this helper starting from root // and likely return V (the value) or throw an exception if not found.
-
注意: 用于
insert/remove的内部find变体可能需要返回TreeNode*&并且是非const的。
-
逻辑: 从根节点开始,比较目标键
-
插入 (Insert):
-
逻辑: 类似查找,递归向下直到找到一个
nullptr的链接 (即合适的叶子位置),然后将新节点连接到该位置。 -
C++ (Helper using
TreeNode*&):1 2 3 4 5 6 7 8 9 10 11 12 13
template <class K, class V> void BST<K, V>::insert(TreeNode<K, V>*& subroot, const K& key, const V& value) { if (subroot == nullptr) { // Found the insertion spot! Modify the pointer (passed by reference) subroot = new TreeNode<K, V>(key, value); } else if (key < subroot->key) { insert(subroot->left, key, value); // Recurse left } else if (key > subroot->key) { insert(subroot->right, key, value); // Recurse right } // else key == subroot->key: Handle duplicate keys (e.g., ignore, update value, throw error) } // Public interface calls: insert(root, key, value);
-
关键:
subroot = new TreeNode(...)之所以能修改树结构,是因为subroot是TreeNode*&(指针的引用)。
-
逻辑: 类似查找,递归向下直到找到一个
-
删除 (Remove):
-
中序前驱 (In-order Predecessor, IOP):
* 定义: 在中序遍历序列中,紧接在当前节点之前的那个节点。
* 查找方法: 从当前节点的左子节点开始,一直向右走到底。
* 关键属性: IOP 节点本身最多只有一个左子节点 (绝对没有右子节点)。这保证了递归删除 IOP 时只会遇到 Case 1 或 Case 2。 -
中序后继 (In-order Successor, IOS): (另一种可选策略)
- 定义: 在中序遍历序列中,紧接在当前节点之后的那个节点。
- 查找方法: 从当前节点的右子节点开始,一直向左走到底。
- 关键属性: IOS 节点本身最多只有一个右子节点 (绝对没有左子节点)。
- 实现选择: 可以选择使用 IOP 或 IOS。下面的代码示例使用了 IOP。
-
目标: 从 BST 中删除一个键为
key的节点,并保持 BST 属性。这是 BST 操作中最复杂的一个。 - 核心挑战: 删除节点后,如何重新连接子树以维持 BST 结构。
- 类型:1. 无叶子节点 2. 有一个叶子节点 3. 有两个叶子节点
- C++ 接口与辅助函数:
```cpp // Public interface template <class K, class V> void BST<K, V>::remove(const K& key) { remove(root, key); // Call private helper }
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63
// Private recursive helper function (using reference to pointer) template <class K, class V> void BST<K, V>::remove(TreeNode<K, V>*& subroot, const K& key) { if (subroot == nullptr) { return; // Key not found, nothing to remove } // Step 1: Find the node to remove if (key < subroot->key) { remove(subroot->left, key); // Recurse left } else if (key > subroot->key) { remove(subroot->right, key); // Recurse right } else { // Step 2: Node found (key == subroot->key). Handle the three cases. // Case 1: Leaf Node (0 children) // "leaf element, no child, very easy" if (subroot->left == nullptr && subroot->right == nullptr) { delete subroot; subroot = nullptr; // The parent's pointer (via reference) is now null // Case 2: One Child // "Remove in a linked list", "one child" // Only right child exists else if (subroot->left == nullptr) { TreeNode<K, V>* temp = subroot; // Store node to delete subroot = subroot->right; // Bypass: parent points to the right child delete temp; // Delete the original node } // Only left child exists else if (subroot->right == nullptr) { TreeNode<K, V>* temp = subroot; // Store node to delete subroot = subroot->left; // Bypass: parent points to the left child delete temp; // Delete the original node } // Case 3: Two Children // "How to arrange the children??" -> Use In-order Predecessor (IOP) else { // 3a. Find the In-order Predecessor (IOP) // IOP: "far right node in the left subtree" // Find the pointer *to* the IOP node itself TreeNode<K, V>* iopNode = subroot->left; // Start in the left subtree while (iopNode->right != nullptr) { iopNode = iopNode->right; // Go as far right as possible } // Note: Slides 9-11 correctly state IOP has 0 or 1 child (never a right child) // 3b. Copy IOP's data to the node we intended to remove (Conceptual "Swap") // We replace the data in `subroot` with the data from `iopNode`. // This preserves the BST structure locally around `subroot`. subroot->key = iopNode->key; subroot->value = iopNode->value; // 3c. Recursively remove the original IOP node - Slides 16-18 // Now, the problem reduces to removing the IOP node (which contains the copied data) // from the *left subtree*. Since the IOP has 0 or 1 child, // this recursive call will hit Case 1 or Case 2. remove(subroot->left, iopNode->key); // Remove the IOP from the left subtree } } } ``` -
中序前驱 (In-order Predecessor, IOP):
BST 复杂度分析
-
基本原则: 所有主要的 BST 操作 (find, insert, delete) 的时间复杂度都依赖于树的高度 (Height)
h。复杂度为 $O(h)$。 -
树的高度与节点数的关系:
- 设
n为节点数,h为树的高度。 -
最佳情况 (Best Case - Balanced Tree):
- 树的结构尽可能“茂密”,接近完美二叉树。
- 节点数 $n$ 最多为 $2^{h+1} - 1$。
- 反解得到高度 $h$ 的下界 (Lower bound): $h \ge \lfloor \log_2 n \rfloor$,即 $h = \Omega(\log n)$。
-
最坏情况 (Worst Case - Degenerate Tree):
- 树退化成链表。
- 节点数 $n$ 最少可以只构成高度 $h = n-1$ 的树 (只有一个节点时 h=0)。
- 高度 $h$ 的上界 (Upper bound): $h \le n-1$,即 $h = O(n)$。
- 设
-
插入顺序的影响:
- BST 的最终高度严重依赖于键的插入顺序。
- 例如,按顺序插入
1, 2, 3, 4, 5, 6, 7会导致 $O(n)$ 的高度。 - 插入
4, 2, 6, 1, 3, 5, 7会得到更平衡的树,高度接近 $O(\log n)$。
- 例如,按顺序插入
- 对于
n个不同的键,存在 $n!$ 种可能的插入顺序。
- BST 的最终高度严重依赖于键的插入顺序。
-
平均情况 (Average Case - Random Insertions):
- 如果我们假设所有 $n!$ 种插入顺序是等概率的 (即随机插入),那么 BST 的平均高度 (期望高度) 被证明是 $O(\log n)$。
- 技术比喻: 虽然可能运气很差构造出一条长链,但“平均来说”,随机插入更倾向于产生相对平衡的树。
- 运行时间总结 (Slides 30-31):
| Operation | BST Average Case | BST Worst Case | Sorted Array | Sorted List |
|---|---|---|---|---|
find |
$O(\log n)$ | $O(n)$ | $O(\log n)$ | $O(n)$ |
insert |
$O(\log n)$ | $O(n)$ | $O(n)$ | $O(n)$ |
delete |
$O(\log n)$ | $O(n)$ | $O(n)$ | $O(n)$ |
traverse |
$O(n)$ | $O(n)$ | $O(n)$ | $O(n)$ |
- 对于 Sorted List:
-
insert/delete如果给定位置 (例如,你知道要插入/删除的节点的指针/迭代器),操作本身是 O(1) (假设是双向链表)。 - 但如果需要先查找元素 (
Arbitraryinsert/delete),查找时间是 O(n),所以整体是 O(n)。
-
- Sorted Array 的
insert/delete是 O(n) 因为需要移动元素来保持有序。find可以用二分查找 O(logn)。
Rotation
Height-balanced Tree
高度平衡的定义
- 高度平衡(Height balance):对于每一个节点,其左子树的高度和右子树的高度之差的绝对值不超过 1。
- 平衡因子(balance factor):$b = height(T_R) - height(T_L)$,其中 $T_R$ 是右子树,$T_L$ 是左子树。
- 如果一棵树是高度平衡的,则对于每个节点,$-1 \le b \le 1$。
- 举例:
- “mountain” 形状的树通常更平衡,而 “stick” 形状的树则不平衡。
- 这就像在跷跷板上保持平衡,两边的重量要尽可能接近。
Rotation
1. 旋转的目的
- 保持 BST 的性质:旋转操作不能破坏 BST 的有序性。
- 调整树的平衡:通过旋转,将 “stick” 形状的树转换为 “mountain” 形状的树,使其更加平衡。
2. 旋转的种类
- 左旋(Left Rotation):将一个节点的右子节点提升为父节点,原父节点变为左子节点。
- 右旋(Right Rotation):将一个节点的左子节点提升为父节点,原父节点变为右子节点。
3. 旋转的步骤 (以右旋为例)
- 找到不平衡的节点:从底向上找到第一个平衡因子绝对值大于 1 的节点。
- 确定旋转类型:根据不平衡节点的子树结构,确定需要进行哪种旋转。
核心旋转操作
我们先定义两个基本的旋转操作:左旋和右旋。
1. 右旋 (Right Rotation)
当节点 z 的左子树 (y) 比右子树过高,并且不平衡是由插入到 y 的左子树 (x) 中引起的时 (即 Left-Left Case),通常执行右旋。
目标:将 y 提升为子树的新根,z 成为 y 的右子节点。
图示:
1
2
3
4
5
6
7
z y
/ \ / \
y T4 ===> x z (围绕 z 进行右旋)
/ \ / \ / \
x T3 T1 T2 T3 T4
/ \
T1 T2
-
z: 不平衡的节点。 -
y:z的左子节点。 -
x:y的左子节点 (导致不平衡的插入路径上的节点)。 -
T1, T2, T3, T4: 代表可能的子树 (可能是 NULL)。
操作步骤:
-
y的右子树 (T3) 成为z的新的左子树。 -
z成为y的新的右子节点。 -
y成为原z位置的新根节点。
伪代码/C++ 代码 (假设节点结构包含 left, right, height 成员):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
struct Node {
int key;
Node *left;
Node *right;
int height;
// Constructor...
};
// Helper function to get height (handles NULL nodes)
int height(Node* N) {
if (N == nullptr)
return -1; // 或者 0, 取决于高度定义 (空树高度为-1 或 叶子节点高度为0)
// 这里假设空树高度为 -1, 叶子节点高度为 0
return N->height;
}
// Helper function to update height of a node
void updateHeight(Node* N) {
if (N != nullptr) {
N->height = 1 + std::max(height(N->left), height(N->right));
}
}
// 执行右旋操作
// 输入: z - 需要围绕其进行右旋的节点 (不平衡节点)
// 返回: 旋转后子树的新根节点 (y)
Node* rightRotate(Node* z) {
Node* y = z->left; // y 是 z 的左孩子
Node* T3 = y->right; // T3 是 y 的右子树
// 执行旋转
y->right = z; // z 成为 y 的右孩子
z->left = T3; // T3 成为 z 的左孩子
// 更新高度 (必须先更新 z, 再更新 y, 因为 y 的高度依赖于更新后的 z)
updateHeight(z);
updateHeight(y);
// 返回新的根节点
return y;
}
现实比喻:想象 z 是一个枢轴,你抓住 y 向上推,z 就顺时针旋转下来成为 y 的右边部分,而原来夹在 y 和 z 之间的 T3 就挂在了 z 的左边空位上。
2. 左旋 (Left Rotation)
当节点 z 的右子树 (y) 比左子树过高,并且不平衡是由插入到 y 的右子树 (x) 中引起的时 (即 Right-Right Case),通常执行左旋。
目标:将 y 提升为子树的新根,z 成为 y 的左子节点。
图示:
1
2
3
4
5
6
7
z y
/ \ / \
T1 y ===> z x (围绕 z 进行左旋)
/ \ / \ / \
T2 x T1 T2 T3 T4
/ \
T3 T4
-
z: 不平衡的节点。 -
y:z的右子节点。 -
x:y的右子节点 (导致不平衡的插入路径上的节点)。 -
T1, T2, T3, T4: 代表可能的子树 (可能是 NULL)。
操作步骤:
-
y的左子树 (T2) 成为z的新的右子树。 -
z成为y的新的左子节点。 -
y成为原z位置的新根节点。
伪代码/C++ 代码:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
// 执行左旋操作
// 输入: z - 需要围绕其进行左旋的节点 (不平衡节点)
// 返回: 旋转后子树的新根节点 (y)
Node* leftRotate(Node* z) {
Node* y = z->right; // y 是 z 的右孩子
Node* T2 = y->left; // T2 是 y 的左子树
// 执行旋转
y->left = z; // z 成为 y 的左孩子
z->right = T2; // T2 成为 z 的右孩子
// 更新高度 (先更新 z, 再更新 y)
updateHeight(z);
updateHeight(y);
// 返回新的根节点
return y;
}
现实比喻:与右旋相反,抓住 y 向上推,z 逆时针旋转下来成为 y 的左边部分,原来夹在 z 和 y 之间的 T2 挂在了 z 的右边空位上。
当插入路径形成 “zig-zag” 形状时,需要进行两次旋转。
3. 左右旋 (Left-Right Rotation, LR)
当节点 z 的左子树 (y) 比右子树过高,但!不平衡是由插入到 y 的右子树 (x) 中引起的时 (即 Left-Right Case)。形状像一个 “<”。
目标:将 x 提升为子树的新根。
图示:
1
2
3
4
5
6
7
z z x
/ \ / \ / \
y T4 -(L@y)-> x T4 -(R@z)-> y z (先对 y 左旋, 再对 z 右旋)
/ \ / \ / \ / \
T1 x y T3 T1 T2 T3 T4
/ \ / \
T2 T3 T1 T2
操作步骤:
-
先对
z的左子节点y进行一次左旋 (Left Rotation)。这会将 LR 情况转化为 LL 情况。 -
再对不平衡节点
z进行一次右旋 (Right Rotation)。
伪代码/C++ 代码:
1
2
3
4
5
6
7
8
9
10
// 执行左右旋操作
// 输入: z - 不平衡节点
// 返回: 旋转后子树的新根节点 (x)
Node* leftRightRotate(Node* z) {
// 1. 对 z 的左孩子 y 进行左旋
z->left = leftRotate(z->left); // y 被 x 替换, 返回的新根 x 成为 z 的新左孩子
// 2. 对 z 进行右旋
return rightRotate(z); // 返回最终的新根 x
}
现实比喻:想象 < 形状的链条,先把它掰直 (对 y 左旋,变成 / 形状,即 LL),然后再整体旋转 (对 z 右旋) 使其平衡。
4. 右左旋 (Right-Left Rotation, RL)
当节点 z 的右子树 (y) 比左子树过高,但!不平衡是由插入到 y 的左子树 (x) 中引起的时 (即 Right-Left Case)。形状像一个 “>”。
目标:将 x 提升为子树的新根。
图示:
1
2
3
4
5
6
7
z z x
/ \ / \ / \
T1 y -(R@y)-> T1 x -(L@z)-> z y (先对 y 右旋, 再对 z 左旋)
/ \ / \ / \ / \
x T4 T2 y T1 T2 T3 T4
/ \ / \
T2 T3 T3 T4
操作步骤:
-
先对
z的右子节点y进行一次右旋 (Right Rotation)。这会将 RL 情况转化为 RR 情况。 -
再对不平衡节点
z进行一次左旋 (Left Rotation)。
伪代码/C++ 代码:
1
2
3
4
5
6
7
8
9
10
// 执行右左旋操作
// 输入: z - 不平衡节点
// 返回: 旋转后子树的新根节点 (x)
Node* rightLeftRotate(Node* z) {
// 1. 对 z 的右孩子 y 进行右旋
z->right = rightRotate(z->right); // y 被 x 替换, 返回的新根 x 成为 z 的新右孩子
// 2. 对 z 进行左旋
return leftRotate(z); // 返回最终的新根 x
}
现实比喻:想象 > 形状的链条,先把它掰直 (对 y 右旋,变成 \ 形状,即 RR),然后再整体旋转 (对 z 左旋) 使其平衡。
总结
- 旋转的目的:在保持 BST 性质的前提下,调整树的局部结构以恢复平衡。
- 基本操作:左旋和右旋是基础,时间复杂度为 $O(1)$。
-
四种情况:
-
LL (Left-Left): 右旋
z。 -
RR (Right-Right): 左旋
z。 -
LR (Left-Right): 先左旋
y(即z->left),再右旋z。 -
RL (Right-Left): 先右旋
y(即z->right),再左旋z。
-
LL (Left-Left): 右旋
-
关键点:
- 正确识别不平衡节点
z和导致不平衡的路径 (x,y)。 - 精确地更新节点的
left,right指针。 -
非常重要:在每次旋转后,必须更新受影响节点 (
z,y, 可能还有x) 的高度信息,否则后续的平衡判断会出错。
- 正确识别不平衡节点
Dictionary ADT
Dictionary(字典)是一种关联式容器,存储键值对。
主要操作:
-
put(key, value)- 插入/更新键值对 -
get(key)- 根据键检索值 -
remove(key)- 删除键值对 -
containsKey(key)- 检查键是否存在 -
size()- 返回字典中的键值对数量 -
isEmpty()- 检查字典是否为空 -
keys()- 返回所有键的集合